概要
基盤研究(A)
人と自動運転車間における適切な信頼感醸成手法の構築:工学とデザイン学の融合
令和4年度〜令和6年度
研究機関
一般財団法人日本自動車研究所
研究代表者
平岡 敏洋 一般財団法人日本自動車研究所 新モビリティ研究部 研究員
研究分担者
霜野 慧亮 東京大学 生産技術研究所 特任助教
小野 晋太郎 福岡大学 工学部 准教授
荒川 俊也 日本工業大学 先進工学部 教授
小栗 宏次 愛知県立大学 情報科学部 教授
河中 治樹 愛知県立大学 情報科学部 准教授
Pennigton Miles 東京大学 大学院情報学環・学際情報学府 教授
本間 健太郎 東京大学 生産技術研究所 准教授
劉 海龍 奈良先端科学技術大学院大学 先端科学技術研究科 准教授
研究開始時の研究の概要
本研究では,ドライバや外部の交通参加者(歩行者や他車両のドライバなど)に対し,自動運転車に対する適切な信頼を醸成するための手法を,情報工学・機械工学・人間工学といった工学的見地だけでなく,デザイン学的見地に基づいて構築する.本研究は,1班:自動運転車に対して人が抱く信頼感の推定(1-1班:生体信号に基づく信頼感推定,1-2班:カメラ画像に基づく信頼感推定),2班:自動運転車から人に対して情報提示を行うことで人の適切な信頼較正を行うHMI(2-1班:ドライバに対するiHMI,2-2班:外部交通参加者に対するeHMI),3班:HMIデザインの提案およびプロトタイピング,の5班体制で進めている.
本研究室では,1-1班として様々な生体信号を用いて外部の交通参加者の信頼感推定を行っている.
実験背景
自動運転車に外部HMI(eHMI)を搭載することで,従来ドライバによって行われていたアイコンタクトやジェスチャを代替し,外部の交通参加者の不安を軽減することが期待されている.eHMIには様々なタイプが提案されているものの,決定的な評価手法は未だ確立されていない.先行研究では,eHMIの評価に被験者によって回答された主観的な指標を用いた手法が多くみられるが,主観的な評価は評価者の視点や文脈によって大きく異なる可能性が指摘されている.そこで,本実験では,被験者の皮膚コンダクタンスや視線・瞳孔径を計測し,それらの特徴量を算出することで,eHMIを客観的かつ包括的に評価するシステムの構築を目指す.
実験環境
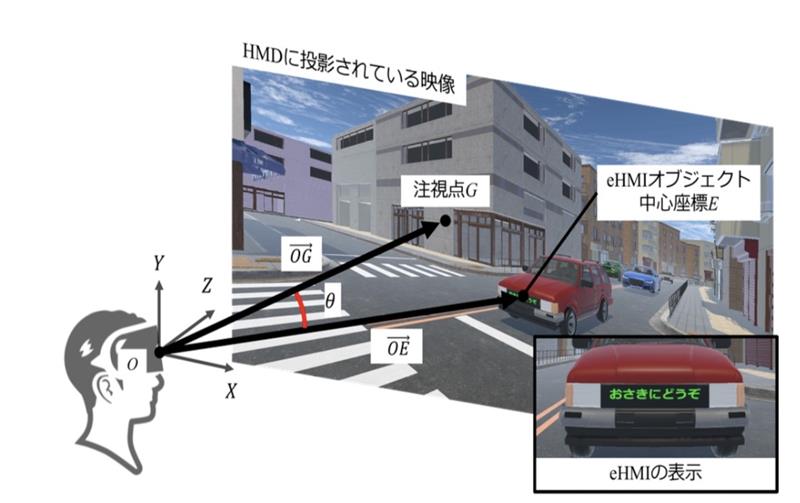
条件統制や様々なeHMIパターン実装が容易であること,またeHMIと交通参加者の意思疎通がうまくいかなかった場合に車両と歩行者などの交通参加者が接触するなどの問題を防ぐためUnityを用いた仮想環境を作成し,VRを用いて実験を行った.実験では被験者がVR内で接近する車両を視認し,様々なeHMIに基づいて横断の意思決定を行う状況をシミュレートする.被験者にはHMDを装着させ,仮想的な都市環境でeHMIの動作を観察させる.


2022年度取り組み
取り組み目的
自動運転車に搭載されるeHMIの信頼性を適切に評価する方法は定まっていない。本研究では、歩行者の注視点情報を活用し、eHMIの信頼度を客観的かつ連続的に評価する方法を確立することを目指す。
方法・情報
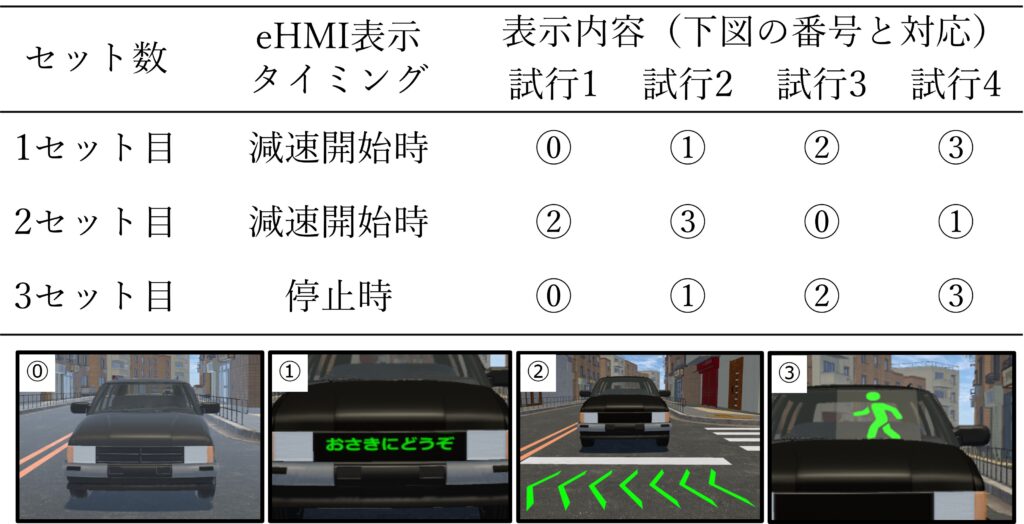
先行研究では、歩行者は車両の意図が不明確な場合、より注視する傾向がある。本研究では、「eHMIの注視時間が長いほど信頼度が低い」という仮説を立て、被験者の注視方向を測定し、eHMIへの信頼感を評価する指標を提案した。検証のためにVR環境で実験を行い、信号のない横断歩道で自動運転車の接近を体験させ、eHMIの表示タイミングや内容に応じた注視データを収集した。さらに、被験者にeHMIの分かりやすさや横断判断への影響を5段階で評価させ、信頼度との関係を分析した。
実験結果・考察
実験の結果、eHMIの表示タイミングが歩行者の信頼感に影響を与えることが明らかになった。
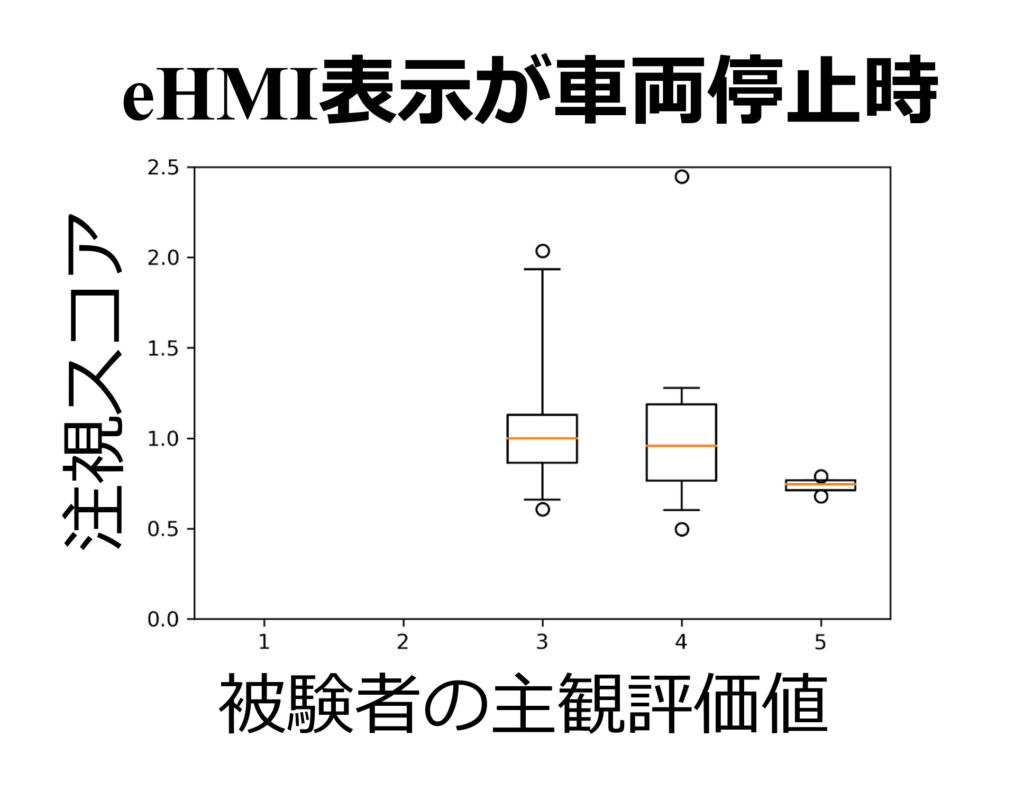
具体的には、自動運転車が減速を開始するタイミングでeHMIを表示した場合、注視スコアと主観評価の間に明確な相関は見られなかった。一方で、自動運転車が停止するタイミングでeHMIを表示した場合、信頼感が高いほどeHMIの注視時間が短くなるという負の相関が確認された。この結果から、迅速な判断が求められる状況では、信頼できるeHMIほど短時間の注視で理解されることが示唆された。
2023年度取り組み
取り組み目的
自動運転車ではドライバーの意思表示がなく、歩行者が車両の意図を理解できず不安を感じると指摘されている。この不安を軽減するため、音や光で意図を伝えるeHMIが提案されているが、その効果を定量的に評価する指標は確立されていない。本研究では、皮膚コンダクタンス反応を用いて歩行者の不安感を推定し、eHMIの評価への応用を検討する。従来の研究が強い不安を対象としていたのに対し、本研究では仮想環境を用いて比較的軽度の不安を計測し、その関係性を分析する。
方法・情報
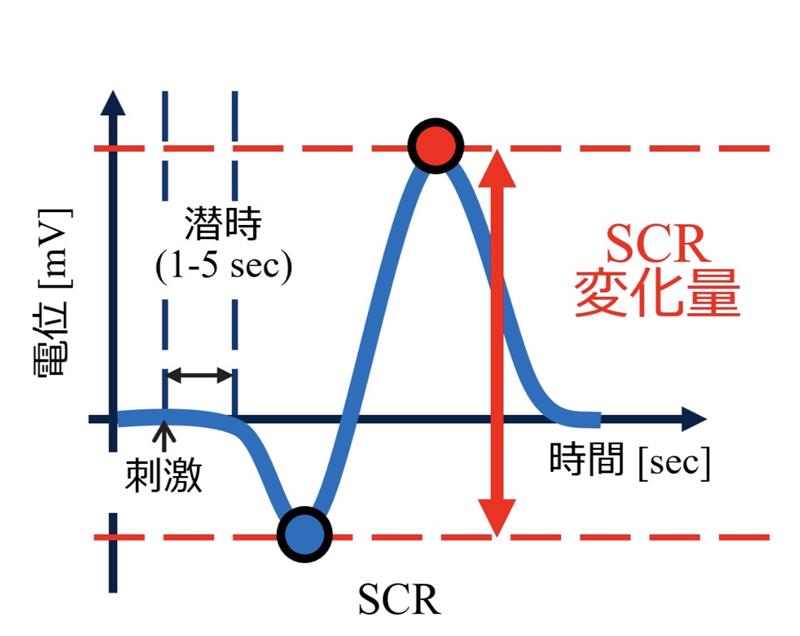
本研究では、VR環境を用いた高所視界体験を通じて、被験者の皮膚コンダクタンス反応を測定し、不安感との関係を分析した。20代の男性7名を対象に、Unity 3D Engineで構築したVR環境で、25m~200mの高度での視界体験を実施した。各高度での視線誘導後、不安感を5段階で評価し、SCRの最大変動量を記録した。得られたデータを基に、CNNを用いて機械学習を行い、不安感を5段階分類するモデルを構築した。特徴量にはSCRの平均値・標準偏差・最大変動量を用い、k-foldクロスバリデーションで評価を行った。

実験結果・考察
実験の結果、高度が高くなるにつれてSCRの変動量が増加し、不安感の評価スコアも高くなる傾向が見られた。しかし、被験者ごとに個人差があり、高度に対する不安の感じ方にはばらつきがあった。不安感の推定精度は52.5%にとどまり、従来の生体指標(心拍・脳波)の70〜80%と比較して低かった。これは、高所視界体験による不安が比較的小さく、SCRの変動が微弱であるため、分類が困難であったことが要因と考えられる。また、SCRは強い不安には明確に反応するが、軽度の不安の識別は難しいことが分かった。一方で、事故の危険性が高い状況ではSCRが大きく変動する可能性があり、eHMIの評価指標として活用できる可能性が示唆された。今後は、心拍や視線計測と組み合わせることで、より正確な不安感の推定が可能になると考えられる。
2024年度取り組み
取り組み目的
自動運転車がレベル3以上になると、ドライバーの意思表示がなくなり、歩行者が車両の意図を理解しにくく、不安を感じることが指摘されている。不安を感じた歩行者は横断やすれ違いをためらい、交通渋滞の原因となる可能性がある。この問題を解決するため、音や光で意図を伝えるeHMIが提案されているが、その効果を定量的に評価する指標は確立されていない。本研究では、皮膚コンダクタンス反応、視線の注視時間、瞳孔径の変動 を計測し、機械学習を用いた評価システムを構築する。特に、VR環境で様々なeHMIを提示し、歩行者の生体反応を測定することで、eHMIの客観的な評価指標を提案することを目的とする。
方法・情報
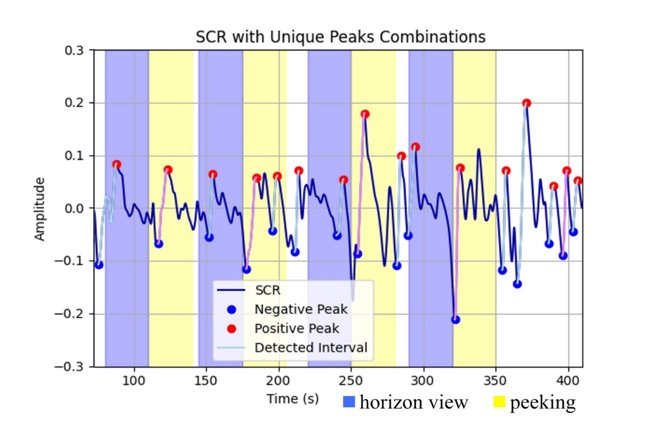
本研究では、皮膚コンダクタンス反応、視線の注視時間、瞳孔径の変動 の三つの生体指標を用いてeHMIの影響を評価した。まず、SCRを測定し、不安感の強さを推定するためにバンドパスフィルタを適用し、eHMIの有無による変動を比較した。次に、視線の注視時間を分析し、「eHMIを注視する時間が長いほど信頼度が低い」という仮説のもと、相対的な注視スコアを算出した。さらに、瞳孔径の変動を測定し、CNNを用いて明るさやコントラストの影響を補正し、関心度を推定した。実験はVR環境で実施し、歩行者が横断するシナリオや狭路での対峙シナリオを設定し、eHMIの表示方法を変えながら2回ずつ試行した。最後に、eHMIが横断判断に与えた影響を5段階評価し、生体指標との相関を分析した。
実験結果・考察
実験の結果、注視スコアと瞳孔径変動比には有意差が確認され、eHMIのデザインや表示タイミングが歩行者の注意や関心に影響を与えることが示された。一方、SCR変動比には有意差が見られず、強い不安や恐怖を感じる状況では有効な指標となる可能性があるが、eHMIの影響を測定するには不十分であることが示唆された。これまでeHMIの評価は主観的な手法が中心であったが、本研究のように生体指標を用いた客観的評価と組み合わせることで、より正確な分析が可能になる。特に、注視スコアと瞳孔径変動比は、eHMIの信頼性や関心度を測定する上で有効な指標となることが示された。
まとめ
本研究では、eHMIを客観的かつ包括的に評価するため、生体指標を複数計測する評価手法を提案 した。従来の主観評価中心の手法に対し、皮膚コンダクタンス・視線・瞳孔径を測定し、機械学習を用いた分析を実施 した。VR環境での実験の結果、注視時間と瞳孔径変動比が主観評価と有意な差を示し、eHMIの評価に有効であることが示唆 された。また、時系列的な評価が可能となり、生体指標および仮想環境の有効性も確認 された。今後は、収集データを詳細に解析し、異なるシナリオやeHMIデザインに適用することで、本手法の妥当性・再現性を高めることが重要 である。さらに、eHMIがどのような要因で信頼性や不安感に影響を与えるかを詳しく評価することが期待 される。
研究実績
電気情報通信学会 東海支部 卒業研究発表会
優秀卒業研究発表賞
第62回 日本生体医工学会大会
コニカミノルタ科学技術振興財団日本生体医工学会大会奨励賞 / 学生賞
あいちITSワールド2023
出展
GCCE2024
発表
SSI2024
発表