概要
基盤研究(A)
人と自動運転車間における適切な信頼感醸成手法の構築:工学とデザイン学の融合
令和4年度〜令和6年度
研究機関
一般財団法人日本自動車研究所
研究代表者
平岡 敏洋 一般財団法人日本自動車研究所 新モビリティ研究部 研究員
研究分担者
霜野 慧亮 東京大学 生産技術研究所 特任助教
小野 晋太郎 福岡大学 工学部 准教授
荒川 俊也 日本工業大学 先進工学部 教授
小栗 宏次 愛知県立大学 情報科学部 教授
河中 治樹 愛知県立大学 情報科学部 准教授
Pennigton Miles 東京大学 大学院情報学環・学際情報学府 教授
本間 健太郎 東京大学 生産技術研究所 准教授
劉 海龍 奈良先端科学技術大学院大学 先端科学技術研究科 准教授
研究開始時の研究の概要
本研究では,ドライバや外部の交通参加者(歩行者や他車両のドライバなど)に対し,自動運転車に対する適切な信頼を醸成するための手法を,情報工学・機械工学・人間工学といった工学的見地だけでなく,デザイン学的見地に基づいて構築する.本研究は,1班:自動運転車に対して人が抱く信頼感の推定(1-1班:生体信号に基づく信頼感推定,1-2班:カメラ画像に基づく信頼感推定),2班:自動運転車から人に対して情報提示を行うことで人の適切な信頼較正を行うHMI(2-1班:ドライバに対するiHMI,2-2班:外部交通参加者に対するeHMI),3班:HMIデザインの提案およびプロトタイピング,の5班体制で進めている.
本研究室では,1-1班として様々な生体信号を用いて外部の交通参加者の信頼感推定を行っている.
実験背景
自動運転車に外部HMI(eHMI)を搭載することで従来ドライバによって行われていたアイコンタクトやジェスチャを置き換え,外部交通参加者の不安を軽減することが期待されている.eHMIは様々なタイプが提案されているものの,どのようなeHMIが適切な信頼感を得ることができるか定まっていない. そこで,本実験では歩行者の注視点情報に着目しeHMIの客観的かつ連続的な評価を目指す.
実験環境
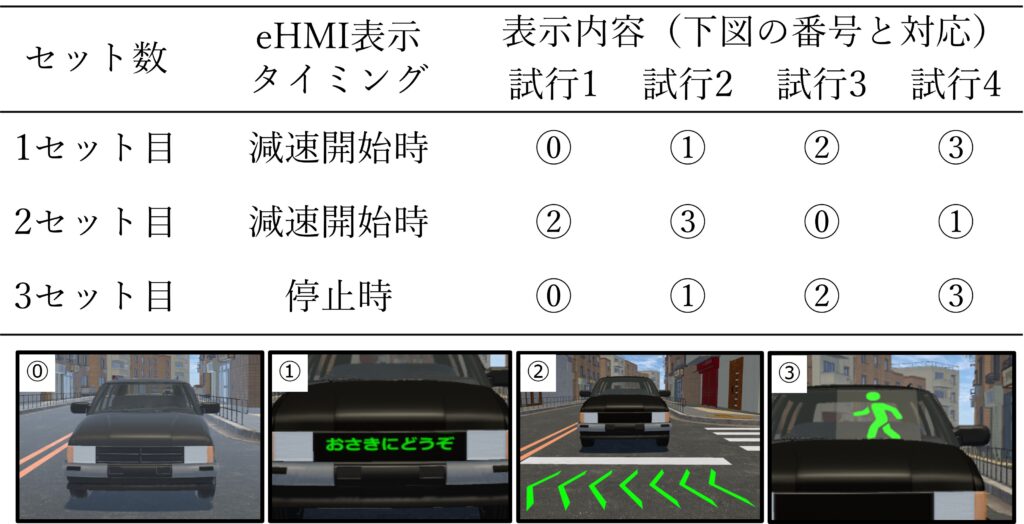
条件統制や様々なeHMIパターン実装が容易であることから,VRを用いた実験を行う. 先行研究においてeHMIが必要なシーンとして扱われることの多い交通整理の行われていない片側1車線道路と横断歩道を模擬した環境をUnityを用いて作成した.(画像参照) 道路にはeHMI搭載の自動運転車のほか,一般車も走行しており,被験者は安全に横断歩道を渡るために車両のインタラクションを行う必要がある.


計測項目
被験者には横断歩道を安全だと判断したタイミングで横断するように指示を行い,eHMIの表示パターンや自動運転車の挙動などの条件を変えて3セット(1セットにつき4試行)の計測を行った.試行中には被験者の主観による自動運転車への信頼感を記録し,生体指標として注視方向の計測と心拍の計測を行った.
実験結果
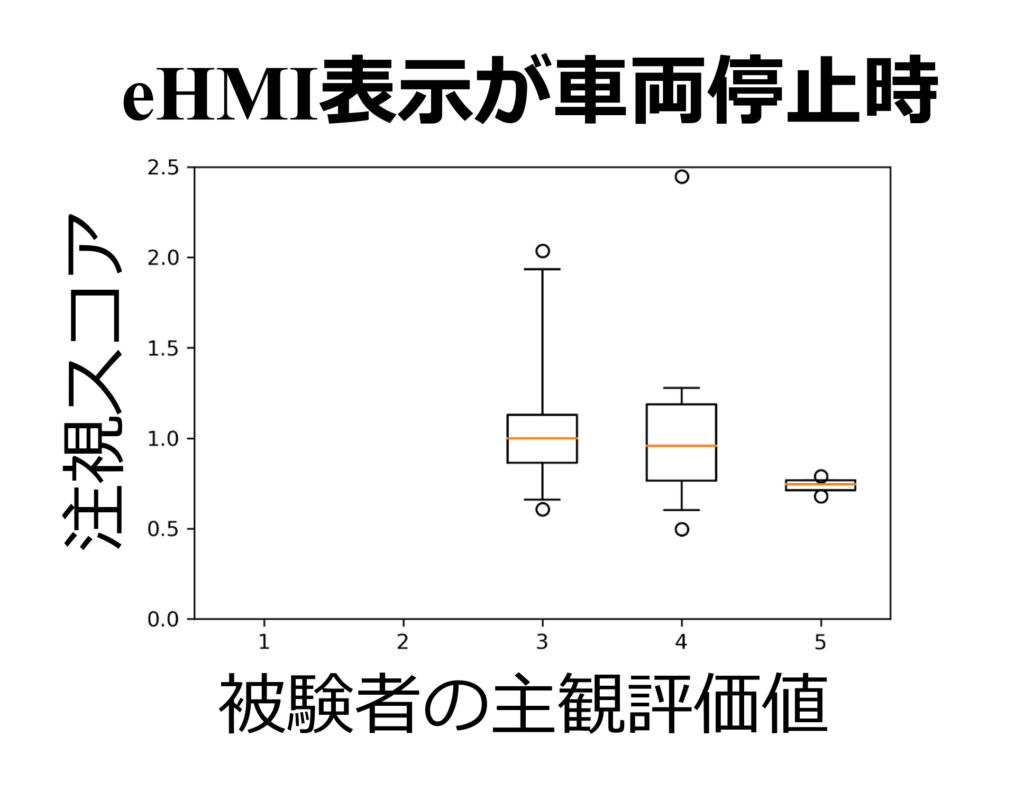
実験の結果,eHMI の表示タイミングが自動運転車両の減速開始時の場合,つまり被験者が余裕をもって横断判断を行う際には主観評価値と注視スコアに相関は見られなかった.一方でeHMI の表示タイミングが自動運転車両の停止時の場合,被験者が迅速な判断を求められる際には主観評価と注視スコアに負の相関が見られた.素早い判断を行う必要がある場合には,信頼度が高いほどeHMI を注視している時間が短いことが示唆された.
研究実績
電気情報通信学会 東海支部 卒業研究発表会
優秀卒業研究発表賞
第62回 日本生体医工学会大会
コニカミノルタ科学技術振興財団日本生体医工学会大会奨励賞 / 学生賞
あいちITSワールド2023
出展